VEHICLE TRACKING SYSTEMS
1456 จำนวนผู้เข้าชม |

GPS (Global Positioning System)
GPS หรือ Global Positioning System เป็นเทคโนโลยีติดตามตำแหน่งที่มีประโยชน์ในหลายสาขาอุตสาหกรรม เช่น การใช้งาน GPS ในงานนำทาง การติดตามยานพาหนะ การจัดการฟลีตขนส่งสินค้า และงานธุรกิจด้านการเดินทาง เป็นต้น
ในงาน GPS การติดตามตำแหน่งของยานพาหนะ เป็นองค์ประกอบสำคัญที่ช่วยให้ผู้ใช้งานสามารถระบุตำแหน่งปัจจุบันของยานพาหนะได้อย่างแม่นยำ และสามารถติดตามการเคลื่อนไหวของยานพาหนะได้ตลอดเวลา โดยสามารถแสดงตำแหน่งปัจจุบันของยานพาหนะบนแผนที่ในระบบ GPS ได้ นอกจากนี้ยังสามารถระบุเส้นทางการเดินทางของยานพาหนะ และสามารถแจ้งเตือนผู้ใช้งานเมื่อยานพาหนะออกนอกเส้นทางที่กำหนดไว้ หรือถ้าเกิดเหตุขัดข้องกับยานพาหนะ เช่น การชน การเกิดไฟไหม้ หรืออุบัติเหตุอื่นๆ ก็สามารถแจ้งเตือนผู้ใช้งานได้ทันทีผ่านระบบ GPS
ระบบ GPS มีประโยชน์อย่างมากในหลายด้าน เช่น ในการนำทางการเดินทาง เพื่อให้ผู้ใช้งานสามารถระบุตำแหน่งปัจจุบันของตนเองและปลายทางได้อย่างแม่นยำ ในการติดตามและควบคุมยานพาหนะ เพื่อตรวจสอบการใช้งานและพิสูจน์ตำแหน่งของยานพาหนะ ในการใช้ในกิจกรรมกีฬา เพื่อติดตามการเคลื่อนไหวของนักกีฬา และในการใช้ในงานทางทหาร เพื่อนำมาใช้ในการนำทางสำหรับทหาร
ระบบดาวเทียมจีพีเอส (GPS)
ระบบดาวเทียมจีพีเอส (GPS: Global Positioning System) เป็นระบบที่ใช้สัญญาณจากดาวเทียมเพื่อประมาณตำแหน่งพิกัดของวัตถุหรือบุคคลในโลกในเวลาจริง ถูกพัฒนาขึ้นโดยหน่วยงาน The United States Department of Defence (DoD) ของประเทศสหรัฐอเมริกา เพื่อประโยชน์ทางการทหารและหน่วยงานราชการของสหรัฐอเมริกา โดยใช้การส่งสัญญาณคลื่นวิทยุลงมายังพื้นโลก โดยระบบ GPS ประกอบด้วยเครื่องส่งสัญญาณที่ติดตั้งบนดาวเทียม และเครื่องรับสัญญาณที่ติดตั้งบนพื้นดิน ซึ่งเครื่องรับสัญญาณจะรับสัญญาณจากดาวเทียมหลายดวงเพื่อประมาณตำแหน่งพิกัดของวัตถุหรือบุคคล
ระบบดาวเทียม GPS ประกอบด้วยส่วนประกอบหลัก 4 ส่วน ดังนี้
1. ดาวเทียม GPS (GPS Satellites) - จำนวน 24 ดาวเทียม GPS ถูกส่งขึ้นเพื่อวิ่งรอบโลกที่เป็นแหล่งอ้างอิงเพื่อคำนวณตำแหน่งของผู้ใช้งาน
2. สถานีควบคุมดาวเทียม GPS (GPS Control Segment) - ประกอบด้วยสถานีควบคุมหลายแห่งที่ตั้งอยู่ทั่วโลก เพื่อควบคุมการทำงานของดาวเทียม GPS และส่งข้อมูลเพื่อปรับปรุงและบำรุงรักษาระบบ
3. ผู้ใช้งาน (GPS User Segment) - ประกอบด้วยอุปกรณ์ติดตามตำแหน่ง (GPS Receiver) ซึ่งใช้รับสัญญาณจากดาวเทียม GPS เพื่อคำนวณหาตำแหน่งปัจจุบัน
4. สัญญาณ (GPS Signal) - สัญญาณรัศมีจากดาวเทียม GPS ถูกส่งออกมาเพื่อให้ GPS Receiver รับรู้และใช้ในการคำนวณตำแหน่ง
ด้วยระบบนี้ ผู้ใช้งานสามารถระบุตำแหน่งบนโลกได้อย่างแม่นยำโดยใช้ GPS Receiver ในอุปกรณ์ต่าง ๆ เช่น โทรศัพท์มือถือ รถยนต์ และเครื่องบิน ซึ่งเป็นประโยชน์มากในการนำทางและการเฝ้าระวังในงานที่ต้องการความแม่นยำสูง เช่น การทำงานของทหาร การเดินทางในท้องถิ่นที่ไม่เคยไปมาก่อน หรือการนำทางทางเรือ การบิน และการขนส่ง
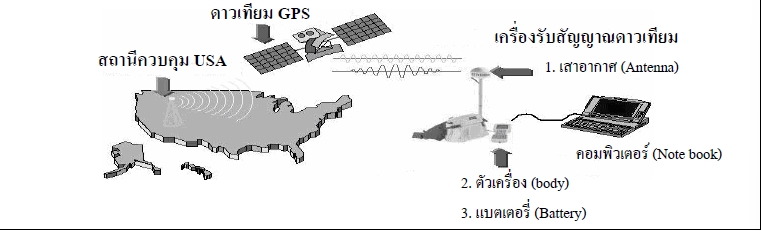
รูปที่ 1.1 ส่วนประกอบของระบบดาวเทียม GPS
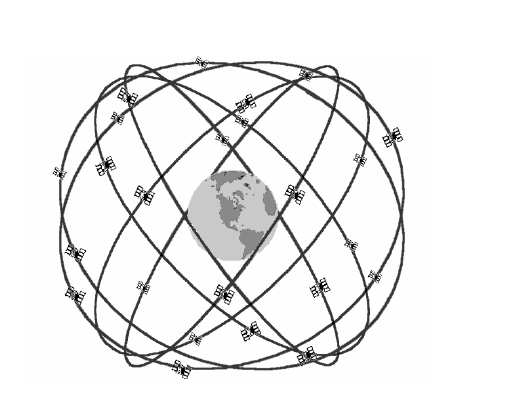
รูปที่ 1.2 ตำแหน่งและวงโคจรของดาวเทียม GPS
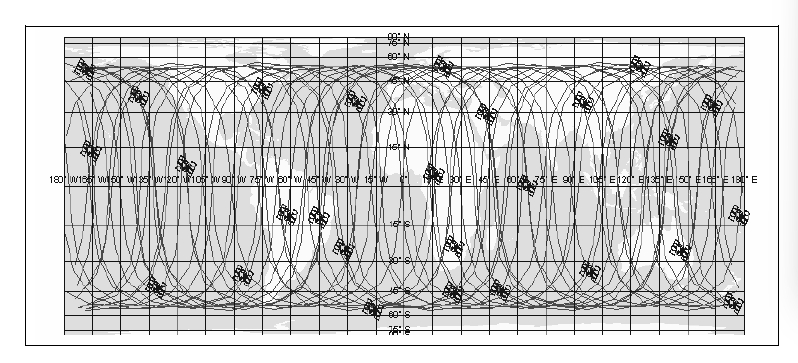
รูปที่ 1.3 การโคจรรอบโลกของดาวเทียม GPS
ในปัจจุบันมีการนำ เอาระบบดาวเทียม GPS (GPS : Global Positioning System) มาประยุกต์ใช้ในงานด้านต่าง ๆ เช่น การทหาร การนำร่อง การเดินเรือ การบิน การติดตาม การสำรวจพื้นที่ การทำแผนที่ เป็นต้น การติดตามยานพาหนะด้วยเครื่องรับสัญญาณดาวเทียม GPS เป็นการบันทึกข้อมูลการเดินทางของยานพาหนะไม่สามารถที่จะแสดงผลการติดตามได้ทันที การนำเทคโนโลยีการสื่อสารแบบไร้สายบนโครงข่ายโทรศัพท์เคลื่อนที่ ที่เรียกว่า จีพีอาร์เอส (GPRS :General Packet Radio Service) มาใช้ร่วมกับเครื่องรับสัญญาณดาวเทียมจีพีเอส โดยให้จีพีอาร์เอสทำหน้าที่ในการติดตามตำแหน่ง
ประโยชน์ของ GPS
GPS (Global Positioning System) เป็นเทคโนโลยีที่มีประโยชน์และนำมาใช้กันอย่างแพร่หลาย ซึ่งประโยชน์ของ GPS ได้แก่ดังนี้
1. การนำทาง: GPS ช่วยให้ผู้ใช้งานสามารถระบุตำแหน่งปัจจุบันของตนเองได้ โดยสามารถระบุตำแหน่งที่ตั้ง และวิธีการเดินทางไปยังจุดหมายต่างๆ ได้ ซึ่งเป็นประโยชน์มากในการนำทางของรถยนต์ และยานพาหนะอื่นๆ รวมถึงการเดินทางเป็นเที่ยวบิน และการเดินเรือในท้องทะเล
2. การใช้งานในกิจกรรมกลางแจ้ง: GPS ช่วยให้ผู้ใช้งานสามารถระบุตำแหน่งปัจจุบันของตนเองในการทำกิจกรรมกลางแจ้งได้ เช่น การปีนเขา การล่องแก่ง การจัดการทรวงอ้อย หรือการจัดการป่าไม้
3. การเฝ้าระวัง: GPS ช่วยให้ผู้ใช้งานสามารถติดตามตำแหน่งของวัตถุหรือบุคคลที่ต้องการเฝ้าระวังได้ เช่น การติดตามรถพยาบาล การติดตามสินค้าที่จัดส่ง หรือการติดตามนักท่องเที่ยวในที่ทำงาน
4. การใช้งานในการทำงาน: GPS ช่วยให้ผู้ใช้งานสามารถระบุตำแหน่งของตนเองและตำแหน่งของวัตถุที่ต้องการเข้าถึงได้อย่างรวดเร็ว
การส่งข้อมูลการติดตามยานพาหนะ
การส่งข้อมูลการติดตามยานพาหนะไปยัง server ของผู้ให้บริการ ช่วยให้สามารถแสดงผลการติดตามยานพาหนะเป็นแบบเวลาจริง (real time) ได้ แต่การส่งข้อมูลด้วยจีพีอาร์เอสนั้น ข้อมูลจะถูกส่งมาเป็นช่วงเวลาห่างกันตั้งแต่ 30 ถึง 300 วินาที ทำให้การติดตามยานพาหนะไม่มีความต่อเนื่อง ดังนั้น ในงานวิจัยนี้จึงได้นำคาลมานอัลกอริธึมซึ่งเป็นอัลกอริธึมที่มีประสิทธิภาพสูงให้ผลการประมาณค่าที่ถูกต้องมาช่วยในการทำนายตำแหน่งของยานพาหนะในช่วงเวลาที่ไม่มีข้อมูลจริงส่งมา และได้มีการนำข้อมูลการติดตามยานพาหนะในอดีตมาประกอบการคำนวณด้วยทำให้การติดตามยานพาหนะมีความต่อเนื่องและสามารถแสดงผลการติดตามยานพาหนะได้อย่างสมจริงมากยิ่งขึ้น ในการจำลองระบบการส่งผ่านข้อมูลการติดตามยานพาหนะด้วยจีพีอาร์เอส กำหนดให้ส่งข้อมูลห่างกันทุก ๆ 10 วินาที และในช่วงเวลาที่ไม่มีข้อมูลจริงส่งมา คาลมานอัลกอริธึมจะทำหน้าที่ทำนายตำแหน่งของยานพาหนะในช่วงเวลาดังกล่าว ผลการจำลองระบบมีความคลาดเคลื่อน เนื่องจากการทำนายตำแหน่งตามแนวละติจูดคิดเป็นระยะทางบนพื้นโลก 25.60 เมตร และความคลาดเคลื่อนตามแนวลองติจูดคิดเป็นระยะทางบนพื้นโลก 35.97 เมตร
ปัจจุบันมีเทคโนโลยีการสื่อสารแบบไร้สายผ่านโครงข่ายโทรศัพท์เคลื่อนที่ สามารถเชื่อมต่อเข้ากับโครงข่ายอินเตอร์เน็ตแบบตลอดเวลา (always on) เรียกว่า จีพีอาร์เอส (General Packet Radio Service : GPRS) เมื่อนำจีพีอาร์เอสมาใช้ร่วมกับจีพีเอส โดยให้จีพีอาร์เอสทำหน้าที่ในการส่งข้อมูลการติดตามยานพาหนะที่ได้รับมาจากเครื่องรับสัญญาณดาวเทียมจีพีเอสเช่นเดียวกับการส่ง SMS (Short Message Service) ส่งข้อมูลการติดตามยานพาหนะไปยังผู้ให้บริการบนโครงข่ายอินเตอร์เน็ต (web server) ทำให้สามารถแสดงผลการติดตามยานพาหนะ เป็นแบบเวลาจริง (real time) ได้
รูปที่ 1.4 โครงสร้างของระบบติดตามยานพาหนะ
ส่วนอวกาศ (space segment)
ส่วนอวกาศ (space segment) ประกอบด้วย ดาวเทียมทั้งหมด 24 ดวง แต่ละดวงโคจรรอบโลกเป็นเวลา 12 ชั่วโมง ความสูงของวงโคจรอยู่ห่างจากพื้นโลกประมาณ 20,200 กิโลเมตร (11,000 ไมล์) มีระนาบของวงโคจร 6 ระนาบ แต่ละระนาบมีดาวเทียม 4 ดวง และเอียงทำมุม 55 องศา กับเส้นศูนย์สูตร (equator) ความถี่ที่ใช้ในการบอกตำแหน่งค่าพิกัดของดาวเทียมแต่ละดวงมี 2 ความถี่ คือ 1,575.42 MHz และ1,227.60 MHz
ส่วนสถานีควบคุม (control station segment)
สถานีควบคุมทำหน้าที่ควบคุมการทำงานทั้งหมดของระบบดาวเทียมจีพีเอส ได้แก่ การติดต่อสื่อสาร (tracking) กับดาวเทียม ทำการคำนวณผล (computation) เพื่อบอกตำแหน่งของดาวเทียมแต่ละดวง และส่งข้อมูลที่ได้ไปยังดาวเทียมอยู่ตลอดเวลา ทำให้ข้อมูลที่ได้เป็นข้อมูลที่ทันสมัยอยู่เสมอ ประกอบด้วย
1. สถานีสังเกตการณ์ (monitor stations) จำนวน 5 แห่งซึ่งตั้งอยู่ที่เมือง Colorado เมือง Diego Garcia เมือง Ascension Island เมือง Kwajalein และเมือง Hawaii
2. จานส่งสัญญาณภาคพื้นดิน (ground antenna) จำ นวน 3 จุด ตั้งอยู่ที่เมือง Ascension Island เมือง Diego Garcia และเมือง Kwajalein
3. สถานีควบคุมหลัก (Master Control Station : MCS) ตั้งอยู่ที่ฐานทัพอากาศ Schriever AFB รัฐ Colorado ประเทศสหรัฐอเมริกา
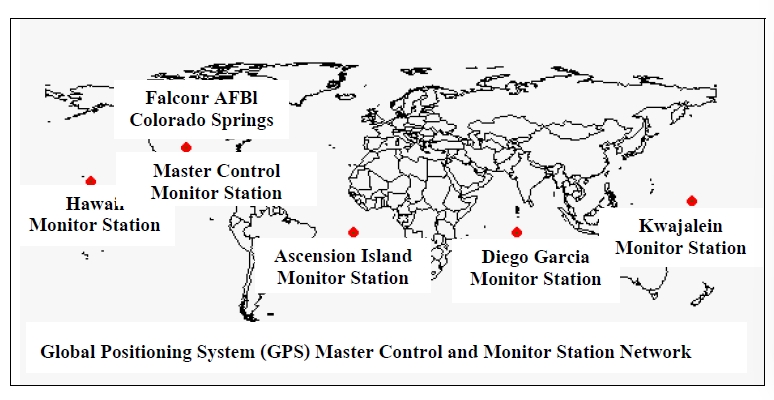
รูปที่ 1.5 สถานีควบคุมของดาวเทียมจีพีเอส
ส่วนผู้ใช้งาน (user segment)
เครื่องรับสัญญาณดาวเทียมจีพีเอส (receiver) ประกอบด้วย 3 ส่วน คือ
1. ตัวเครื่อง (body)
2. ส่วนให้พลังงาน (power supply)
3. ส่วนเสาอากาศ (antenna)
หลักการทำงานพื้นฐานของ GPS
- Satellites Triangulation คือ การทำรังวัดโดยการทำเป็นรูปสามเหลี่ยม หลักการ จะอาศัยตำแหน่งของดาวเทียมในอวกาศเป็นจุดอ้างอิง แล้ววัดระยะจากดาวเทียม 4 ดวงและใช้หลักการทางเรขาคณิตในการคำนวณหาตำแหน่งบนพื้นโลก รูปที่ 1.6 ดาวเทียม 1 ดวง ซึ่งเราจะอยู่ที่พื้นผิวของวงกลมที่มีดาวเทียมเป็นศูนย์กลางมีรัศมี 20,200 กิโลเมตร (11,000 ไมล์ ) รูปที่ 1.7 ดาวเทียม 2 ดวง ซึ่งเราจะอยู่ที่วงกลมที่เป็นรอยตัดของทรงกลมทั้งสอง
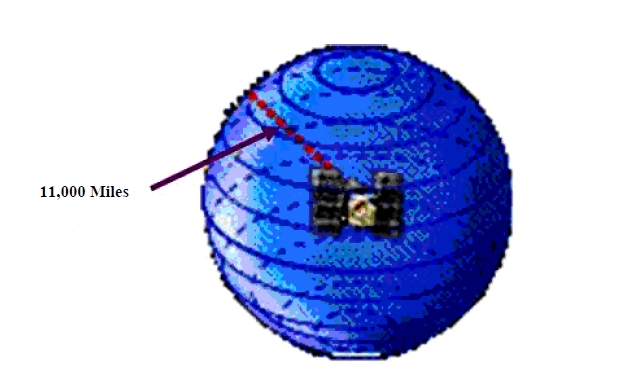
รูปที่ 1.6 ดาวเทียม 1 ดวง ซึ่งเราจะอยู่ที่พื้นผิวของวงกลมที่มีดาวเทียมเป็นศูนย์กลางมีรัศมี 20,200 กิโลเมตร (11,000 ไมล์ )
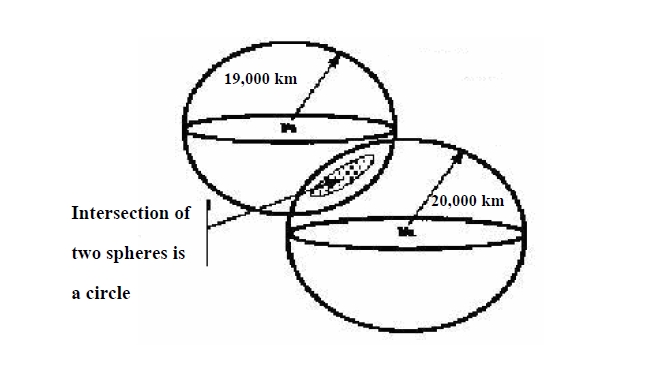
รูปที่ 1.7 ดาวเทียม 2 ดวง ซึ่งเราจะอยู่ที่วงกลมที่เป็นรอยตัดของทรงกลมทั้งสอง
2. วัดระยะทางระหว่างเครื่องรับ GPS กับดาวเทียม GPS โดยการวัดระยะเวลาที่คลื่นวิทยุใช้ในการเดินทางจาก ดาวเทียมสู่เครื่องรับใช้เวลาเดินทางของคลื่นวิทยุ มีสูตรการคำนวณดังนี้
ระยะทาง = ความเร็ว * เวลาที่ใช้เดินทาง
โดยที่คลื่นวิทยุมีความเร็ว = 186,000 ไมล์ต่อนาที
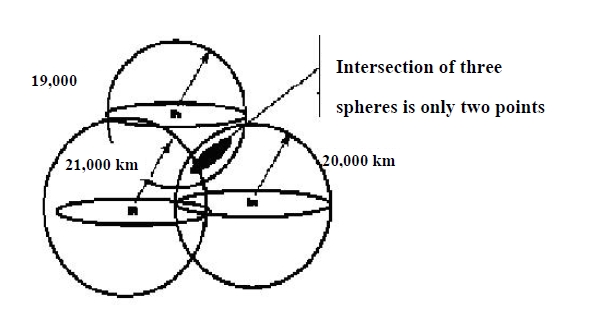
รูปที่ 1.8 ดาวเทียม 3 ดวง ซึ่งเราจะอยู่ที่วงกลมที่เป็นรอยตัดของทรงกลมทั้งสามใน 3 มิติ
ดาวเทียม 3 ดวง ซึ่งเราจะอยู่ที่วงกลมที่เป็นรอยตัดของทรงกลมทั้งสามใน 3 มิติ ตัด 1 จุด ถ้าเป็นดาวเทียม 4 ดวงจะได้ข้อมูลใน 4 มิติ คือ X, Y, Z, T ซึ่งจะทำให้แม่นยำมากขึ้น การวัดระยะเวลาในการเดินทาง คือ การเปรียบเทียบระหว่างคลื่นสัญญาณที่ดาวเทียม ส่งมากับคลื่นสัญญาณที่เครื่องรับ GPS ส่งมา ส่วนคลื่นที่ใช้ในการส่งจะเป็น Pseudo Random Noise Code (PRN)
3. การวัดระยะเวลาที่คลื่นวิทยุใช้ในการเดินทางของ GPS จะต้องใช้นาฬิกาที่แม่นยำมาก ถ้า PRN CODE จากดาวเทียมมีข้อมูลเวลาที่คลื่นเริ่มออกเดินทางจากดาวเทียมเมื่อคลื่นสัญญาณจากดาวเทียมและคลื่นสัญญาณจากเครื่องรับ GPS สมวารกัน (synchronize) และจะต้องใช้ atomic clock ในการวัดเวลา ส่วนเวลาที่ใช้ในการเดินทางจะสั้นมากประมาณ 0.06 วินาที คือเวลาของเครื่องรับ GPS * เวลาของดาวเทียม ส่วนการบอกตำแหน่ง GPS ยังเป็นเวลาที่มีความแน่นอนถึง 10 นาโนวินาทีหรือดีกว่า
4. ต้องทราบตำแหน่งที่แน่นอนของดาวเทียม GPS ในอวกาศ
- วงโคจรสูงมากประมาณ 11,000 ไมล์
- วงโคจรอาจคลาดเคลื่อน (ephemeris errors) เนื่องจากแรงโน้มถ่วงของดวงจันทร์และดวงอาทิตย์
- สถานีควบคุมจะใช้เรดาร์ตรวจสอบการโคจรของดาวเทียม GPS ตลอดเวลาแล้วส่ง ข้อมูลไปปรับแก้ข้อมูลวงโคจรและเวลาของดาวเทียม เมื่อข้อมูลได้รับการปรับแก้แล้วจะถูกส่งมายังเครื่องรับ GPS
5. ต้องแก้ไขความคลาดเคลื่อนที่เกิดจากการเดินทางของคลื่นวิทยุมาสู่โลก สาเหตุของความคลาดเคลื่อนของค่าพิกัดที่คำนวณได้เกิดจาก
- การเดินทางสู่ชั้นบรรยากาศ ionosphere จะมีประจุไฟฟ้า และชั้น troposphere จะมีทั้งความชื้น อุณหภูมิ ความหนาแน่นที่แปรเปลี่ยนได้ตลอดเวลาใน
- การสะท้อนของคลื่นสัญญาณไปในหลายทิศทาง (multipath error) ซึ่งที่ผิวโลกคลื่นสัญญาณกระทบกับวัตถุต่าง ๆ ก่อนถึงเครื่องรับGPS ทำให้เกิดการหักเหและสัญญาณอ่อนลง
- วงโคจรคลาดเคลื่อน (ephemeris error) เนื่องจากแรงโน้มถ่วงของดวงจันทร์และดวงอาทิตย์หรืออาจเกิดจากความคลาดเคลื่อนของนาฬิกาเพียงเล็กน้อย ทำให้การคำนวณระยะทางผิดพลาดได้มากเนื่องจากดาวเทียมอยู่สูงมาก
- ความสัมพันธ์ทางเรขาคณิตระหว่างตำแหน่งของดาวเทียมและตำแหน่งของ เครื่องรับ GPS ซึ่งจะคำนวณเป็นค่า GDOP = Geometric Dilution of Precision เนื่องจากลักษณะการวางตัวของดาวเทียม
Dilution คือ การทำให้ค่าที่คำนวณได้ง่ายขึ้นและ GDOP มีส่วนประกอบ คือ
- PDOP = Position Dilution of Precision เก็บค่าเป็น (3-D)
- HDOP = Horizontal Dilution of Precision เก็บค่าเป็น (latitude, longitude)
- VDOP = Vertical Dilution of Precision เก็บค่าเป็น (height)
- TDOP = Time Dilution of Precision เก็บค่าเป็น (time)
หรืออาจจะเกิดจากความผิดพลาดอื่น ๆ เช่น ความผิดพลาดของคอมพิวเตอร์หรือมนุษย์ที่ควบคุมสถานี ความผิดพลาดของเครื่องรับ GPS หรือที่ software หรือ hardware หรือผู้ใช้ ซึ่งความผิดพลาดนี้มีความไม่แน่นอน
คลื่นสัญญาณจากดาวเทียมจีพีเอส
1. คลื่นพาหะ (carrier code) มี 2 ความถี่ คือ
- L1 Code มีความถี่ 1,575.42 MHz
- L2 Code มีความถี่ 1,227.60 MHz
2. Pseudo Random Noise Code ประกอบด้วย
- C/A Code (Coarse/Acquisition Code หรือโค้ดที่มีความละเอียดต่ำ ) มีความถี่ที่ 1.023 MHz
- P-Code (Precision Code หรือโค้ดที่มีความละเอียดถูกต้องสูง) มีความถี่ 10.23 MHz
- Navigation Code มีความถี่ 50 Hz
ลักษณะเฉพาะบางประการของ Pseudo Random Code
C/A Code (Coarse/Acquisition Code)
- เป็นคลื่นสองสถานะ (binary code - 0, 1) ความถี่ 1.023 MHz
- มีการมอดูเลตกับคลื่นพาหะ L1
- รูปแบบของคลื่น (pattern ของ 0, 1) มีการซ้ำทุก 1023 bits
- รูปแบบของคลื่นจากดาวเทียมแต่ละดวงมีลักษณะเฉพาะตัว ไม่ซ้ำกัน
- ใช้ในกิจการของพลเรือน (Standard Positioning Service : SPS)
P-Code (Precision Code)
- เป็นคลื่นสองสถานะ (binary code - 0, 1) ความถี่ 10.23 MHz
- มีการมอดูเลตกับคลื่นพาหะ L1 และ L2 คือ การแทรกรวมกับคลื่นพาหะ
- มีการเข้ารหัส เป็น Y - code ใน anti – spoofing mode
- เครื่องรับจะต้องมีอุปกรณ์ในการถอดรหัส Y - code จึงจะสามารถ เข้ารหัสได้
- ใช้ในกิจการทางทหาร (Precision Positioning Service : PPS)
- ผู้ใช้ระบบคลื่นนี้จะต้องได้รับการอนุญาตจากรัฐบาลของสหรัฐอเมริกาก่อน
Navigation – Code
- เป็นคลื่นสองสถานะ (binary code - 0, 1) ความถี่ 50 Hz
- มีการมอดูเลตกับคลื่นพาหะ P - Code และ C/A Code
- มีข้อมูลวงโคจรของดาวเทียม (ephemeris) การปรับแก้เวลา (clock correction) และข้อมูลอื่น ๆ ของระบบ
การคำนวณตำแหน่งของจุดบนพื้นโลก กำหนดให้
CO-ORDINATE ของตำแหน่งที่ต้องการทราบเป็น X, Y, Z
CO-ORDINATE ของดาวเทียมดวงที่ 1 เป็น X1, Y1, Z1
CO-ORDINATE ของดาวเทียมดวงที่ 2 เป็น X2, Y2, Z2
CO-ORDINATE ของดาวเทียมดวงที่ 3 เป็น X3, Y3, Z3
CO-ORDINATE ของดาวเทียมดวงที่ 4 เป็น X4, Y4, Z4
ความผิดพลาดของเวลาบนดาวเทียมกับเวลาบนพื้นโลก เป็น t0
เวลาที่สัญญาณจากดาวเทียมดวงที่ 1 เดินทาง เป็น t1
เวลาที่สัญญาณจากดาวเทียมดวงที่ 2 เดินทาง เป็น t2
เวลาที่สัญญาณจากดาวเทียมดวงที่ 3 เดินทาง เป็น t3
เวลาที่สัญญาณจากดาวเทียมดวงที่ 4 เดินทาง เป็น t4
ความเร็วของคลื่นสัญญาณ เป็น C
จะได้ 4 สมการ สำหรับแสดงระยะทางระหว่างดาวเทียมทั้ง 4 ดวงกับจุดที่ต้องการทราบตำแหน่ง คือ
(X-X1)2 + (Y-Y1)2 + (Z-Z1)2 = (C * (T1-T0))2
(X-X2)2 + (Y-Y2)2 + (Z-Z2)2 = (C * (T2-T0))2
(X-X3)2 + (Y-Y3)2 + (Z-Z3)2 = (C * (T3-T0))2
(X-X4)2 + (Y-Y4)2 + (Z-Z4)2 = (C * (T4-T0))2
โดยที่ค่า (X1, Y1, Z1), (X2, Y2, Z2), (X3, Y3, Z3), (X4, Y4, Z4) เป็นค่าที่ถูกส่งลงมาจากดาวเทียม และค่า t1, t2, t3, t4 สามารถหาได้จากการ CORRELATE CODE ที่ส่งลงมากับ CODE ที่ถูกสร้างขึ้นในเครื่องรับ จะทำให้สามารถคำนวณค่าตัวแปร X, Y, Z และ t0 ได้
เครื่องรับสัญญาณดาวเทียมจีพีเอส
เครื่องรับสัญญาณ GPS แบ่งออกได้เป็น 2 กลุ่ม
1. เครื่องรับแบบเรียงลำดับสัญญาณดาวเทียม ได้แก่
1.1 Starved-Power Single Receivers
เครื่องแบบนี้ออกแบบให้พกพาได้และสามารถทำงานได้ด้วยถ่านไฟฉาย
ขนาดเล็ก การจำกัดการใช้กระแสไฟโดยให้ปิดการทำงานตัวเองโดยอัตโนมัติ เมื่อแสดงตำแหน่งครั้งสองครั้งใน 1 นาที เหมาะสำหรับใช้งานบอกตำแหน่งส่วนตัว ข้อเสีย คือ ความถูกต้องของ
GPS ไม่ดี และต่อเชื่อมกับอุปกรณ์อื่นไม่ได้ และไม่สามารถใช้วัดหาความเร็วได้
1.2 Single Channel Receivers
เป็นเครื่องรับสัญญาณห้องเดียวใช้ทำงานหาระยะจากดาวเทียมทุกดวง แต่ที่ไม่เหมือนคือเครื่องรับช่องเดียวแบบมาตรฐานไม่จำกัดที่กำลังไฟ ดังนั้น จึงทำการรับต่อเนื่องได้ มีผลทำให้ความถูกต้องสูงกว่า และใช้วัดหาความเร็วได้
1.3 Fast-Multiplexing Single Receivers
เครื่องรับนี้สามารถเปลี่ยนดาวเทียมได้เร็วกว่ามาก ข้อดีคือ สามารถทำการวัดได้ในขณะที่กำลังรับข้อมูลจากดาวเทียม ดังนั้นเครื่องทำงานได้อย่างต่อเนื่อง และการที่มีนาฬิกาไม่เที่ยงตรงจึงมีผลต่อเครื่องประเภทนี้น้อย
1.4 Two-Channel Sequencing Receivers การเพิ่มช่องรับสัญญาณขึ้นอีกหนึ่งช่องช่วยให้เครื่องเพิ่มขีดความสามารถขึ้นอย่างเห็นได้ชัด
2. เครื่องรับที่สามารถรับสัญญาณดาวเทียมพร้อมกันได้ตั้งแต่ 4 ดวงขึ้นไป (continuous receivers) สามารถแสดงผลค่าตำแหน่งและความเร็วได้ทันทีหรือต้องการความถูกต้องสูงนอกจากข้อดีที่ใช้วัดตำแหน่งอย่างต่อเนื่อง
โปรโตคอลสำหรับอ่านค่าพิกัดจีพีเอส
ปัจจุบันเราสามารถอ่านค่าพิกัดจากเครื่องรับสัญญาณดาวเทียมจีพีเอสโดยอาศัยโปรโตคอลที่เรียกว่า NMEA (National Marine Electronics Association) ซึ่งเป็นระเบียบวิธีการสื่อสารของอุปกรณ์ต่อร่วม (interface protocol) ที่กำหนดมาตรฐานรูปแบบของข้อมูลสำหรับการ
เชื่อมต่อเพื่อรับข้อมูลจากจีพีเอส ประกอบด้วย
GPGGA = Global positioning system fix data
GPGSA = GNSS DOP and active satellite
GPGSV = GNSS satellites in view
GPGLL = Geographic position latitude/longitude
GPBOD = Bearing origin to destination
GPVTG = Course over ground and ground speed
PGRME = Estimated position error
PGRMZ = Altitude Information
PGRMM = Map datum
GPRTE = Route
GPRMC = Recommended minimum specific GNSS data
GPRMB = Recommended minimum navigation information
GNSS = Global navigation satellite system
เทคโนโลยีจีพีอาร์เอส (GPRS: General Packet Radio Service)
จีพีอาร์เอส (GPRS : General Packet Radio Service) คือ เทคโนโลยีสื่อสารโทรคมนาคมที่ได้มีการพัฒนาขึ้นบนโครงข่ายโทรศัพท์เคลื่อนที่ของระบบ GSM (Global System for Mobile Communication) สำหรับการส่งข้อมูลที่รวดเร็ว ซึ่งได้รับการรับรองจาก European Telecommunications Standards Institute (ETSI) และ Telecommunications Industry Association (TIA) และมีความสามารถในการส่งข้อมูลแบบแพ็กเก็ตไปยังอุปกรณ์อื่นๆ ผ่านเครือข่ายโทรศัพท์เคลื่อนที่ ซึ่ง GPRS เป็นเทคโนโลยีที่นิยมใช้ในการสื่อสารข้อมูลขนาดเล็ก ๆ โดยเฉพาะในการใช้งานโทรศัพท์มือถือ เช่น การเข้าอินเตอร์เน็ตบนมือถือ เช่น การส่งข้อความ (SMS) และอื่น ๆ ระบบ GSM เดิมสามารถส่งข้อมูลด้วยอัตราเร็ว 9.6 กิโลบิตต่อวินาที (kbps) สำหรับเทคโนโลยีจีพีอาร์เอสช่วยให้การส่งข้อมูลมีประสิทธิภาพมากขึ้นโดยถ้าอ้างอิงตามทฤษฎีสามารถส่งข้อมูลด้วยอัตราเร็วสูงถึง 171.2 kbps (แต่ในปัจจุบันสามารถส่งข้อมูลได้ที่อัตราเร็ว 40 kbps) อีกทั้งในระหว่างทำการส่งข้อมูลผู้ใช้บริการยังสามารถพูดคุยโทรศัพท์ได้ตามปกติ ข้อมูลที่ถูกส่งในระบบจีพีอาร์เอสจะถูกแบ่งเป็นส่วนย่อย ๆ เรียกว่า แพ็คเก็ต (packet) และส่งไปพร้อม ๆ กันในระบบโครงข่าย เมื่อถึงปลายทางอุปกรณ์ที่อยู่ทางปลายทางจะนำเอาแพ็คเก็ตย่อยๆ ดังกล่าวมาจัดเรียงใหม่และส่งให้ผู้รับ ลักษณะการส่งข้อมูลดังกล่าวเรียกว่า packet switching ซึ่งเป็นระบบเดียวกันกับการส่งข้อมูลในระบบอินเตอร์เน็ต โดยทั่วไปจะทำการส่งข้อมูลเป็นช่วงเวลาห่างกันตั้งแต่ 30 ถึง 300 วินาที ไม่สามารถส่งข้อมูลทุกวินาทีได้เนื่องจากข้อจำกัดของการจราจร (traffic) ในโครงข่ายโทรศัพท์เคลื่อนที่ ทำให้การแสดงผลการติดตามยานพาหนะไม่มีความต่อเนื่อง อีกทั้งยังเป็นข้อมูลการติดตามที่ได้รับมาในขณะเวลานั้นไม่ได้มีการนำผลการติดตามในอดีตมาคำนวณเลย ทำให้การแสดงผลมีความคลาดเคลื่อน ดังนั้นจึงจำเป็นต้องมีอัลกอริธึมสำหรับทำนายตำแหน่งของยานพาหนะในช่วงเวลาที่ไม่มีข้อมูลตำแหน่ง
การใช้งาน GPRS จะทำการเชื่อมต่อกับเครือข่ายโทรศัพท์เคลื่อนที่และมีการเรียกใช้บริการโดยตรงจากอุปกรณ์ที่ต้องการใช้งาน เมื่อมีการส่งข้อมูลแบบแพ็กเก็ตไปยังเครือข่าย จะมีการใช้ระบบการจัดการเชื่อมต่อแบบสองช่องทาง (dual channel) เพื่อป้องกันการสูญเสียข้อมูลและเพิ่มความเร็วในการส่งข้อมูล
ระบบ packet switching network จะทำให้ผู้ใช้สามารถใช้ช่องทางส่งสัญญาณพร้อมๆกันได้ ซึ่งต่างจากระบบโทรศัพท์ปกติที่จะต้องจองช่องสัญญาณไว้ตลอดเวลาที่มีการสื่อสาร และเมื่อจบการสื่อสารนั้น ๆ จึงจะคืนช่องสัญญาณให้กับระบบ เรียกว่าเป็นการส่งข้อมูลแบบ circuit switching ทำให้เกิดปัญหาช่องสัญญาณเต็ม แต่ระบบ packet switching network จะไม่เกิดปัญหาดังกล่าว อย่างไรก็ตาม อัตราเร็วในการส่งข้อมูลอาจลดลง ถ้ามีผู้ใช้หรือปริมาณการรับส่งข้อมูลจำนวนมาก ซึ่งโทรศัพท์เคลื่อนที่ระบบจีพีอาร์เอสนี้จะทำให้ผู้ใช้งานในปัจจุบันสามารถเชื่อมต่อกับระบบอินเตอร์เน็ตเพื่อใช้บริการต่าง ๆ ได้แก่ การรับส่ง E-mail การค้นหาข้อมูล ข่าวสาร หรือติดต่อกับบุคคลอื่นต่าง ๆ ได้ในลักษณะที่เรียกว่า ทุกที่ ทุกเวลาอย่างแท้จริง
คุณสมบัติของระบบจีพีอาร์เอส (GPRS: General Packet Radio Service)
1. การรับส่งข้อมูลที่มีความสามารถในการรับและส่งผ่านเครือข่ายอินเตอร์เน็ตได้สูงถึง 40 kbps ซึ่งจะทำให้สามารถรองรับการส่งข้อมูลในรูปแบบมัลติมิเดีย ได้แก่ รูปภาพกราฟฟิค เสียงและวิดีโอ พร้อมทั้งเชื่อมต่อกับเครือข่ายอินเตอร์เน็ตได้รวดเร็ว และมีประสิทธิภาพมากกว่าเดิมรวมถึงการ Download /Upload ข้อมูลสามารถทำได้ง่ายยิ่งขึ้น
2. always on การเชื่อมต่อเครือข่ายและการรับส่งข้อมูลสามารถดำเนินต่อไป แม้ว่าในขณะที่มีสายติดต่อเข้ามาก็ตาม จึงทำให้การรับส่งข้อมูลไม่ขาดตอนลง
3. wireless internet ที่เชื่อมต่อเข้ากับ Terminal เช่น PDA (Personal Data Assistant) หรือเครื่องคอมพิวเตอร์ Notebook สามารถรับส่งข้อมูลได้เร็วขึ้น
ประโยชน์ของจีพีอาร์เอส
1. ประหยัดค่าใช้จ่าย เนื่องจากเทคโนโลยีจีพีอาร์เอส จะทำให้การคิดอัตราค่าบริการในการใช้อินเตอร์เน็ต ขึ้นอยู่กับช่วงเวลาในการรับ และส่งข้อมูล ไม่ใช่ช่วงเวลาในการเชื่อมต่อ ซึ่งจะทำให้ผู้ใช้ จ่ายตามอัตราค่าบริการในการดาวน์โหลด และอัพโหลดเท่านั้น
2. รวดเร็วยิ่งขึ้น เนื่องจากจีพีอาร์เอสจะช่วยให้ผู้ใช้งานเชื่อมต่อ และรับข้อมูลต่าง ๆผ่านอินเตอร์เน็ตด้วยระยะเวลาที่รวดเร็วกว่าโทรศัพท์เคลื่อนที่ในระบบ GSM ทั่วไป ทำให้การเข้าสู่ website หรือการรับส่ง e-mail เป็นไปอย่างสะดวกและง่ายดาย
3. คุ้มค่า เพราะมีค่าใช้จ่ายน้อย แต่รับผลตอบแทนจากการรับ-ส่งข้อมูลอย่างมากมาย
4. น่าใช้ เนื่องจากจะทำให้ผู้ใช้งานได้รับข้อมูลในทุกรูปแบบ ได้แก่ รูปแบบข้อความหรือรูปแบบมัลติมีเดียซึ่งประกอบด้วยรูปภาพ เสียง และวีดิโอ ทำให้การติดต่อสื่อสารของผู้ใช้งานผ่านโทรศัพท์เคลื่อนที่มีความหลากหลาย
รูปแบบการให้บริการของระบบ GPRS
1. textual and visual information บริการนี้เป็นจุดแตกต่างอย่างแรกที่จีพีอาร์เอสเหนือกว่า GSM ทั่วไป โดยสามารถส่งข้อมูลที่เป็นตัวอักษร หรือรูปภาพกราฟิกไปยังโทรศัพท์มือถือได้อย่างสะดวกรวดเร็ว
2. still images เป็นการส่งภาพนิ่งความละเอียดสูงไปมาระหว่างเครื่องด้วยกันได้ทำให้สามารถส่งภาพถ่าย รวมทั้งภาพที่ถ่ายจากกล้องดิจิตอลสามารถโอนแล้วส่งต่อไปได้ทันที
3. moving images สามารถส่งภาพเคลื่อนไหวได้ เช่น การประชุมทางไกล หรือการส่งภาพจากกล้องวงจรปิดไปยังโทรศัพท์มือถือในกรณีประยุกต์ใช้กับระบบรักษาความปลอดภัย
4. chat เป็นคุณสมบัติของการคุยแบบไม่ใช้เสียง ซึ่งสามารถสนทนากันได้ทั้งแบบเป็นคู่ หรือเป็นกลุ่มได้ และผู้ใช้สามารถ chat ได้ทุกที่
5. web browsing เป็นการเข้าสู่ world wide web ด้วยการใช้โทรศัพท์มือถือ ซึ่งมีความเร็วตั้งแต่ 56 kbps จนถึง 112 kbps
6. E-Mail เป็นบริการพื้นฐานที่มีผู้ใช้นิยมใช้งานมากที่สุดสำหรับการส่งข้อความโดยมีการใช้งานในรูปของ SMS (Short Message Service)
7. file transfer เป็นบริการโอนถ่ายไฟล์ข้อมูล ด้วยอัตราเร็วกว่าการใช้งานผ่านโมเด็มกับโทรศัพท์พื้นฐาน โดยจะรองรับกับโปรโตคอล FTP และแอพพลิเคชั่นสำหรับอ่านข้อความได้แก่ acrobat reader ด้วย
8. audio บริการด้านเสียงของจีพีอาร์เอส มีประสิทธิภาพสูงกว่าโทรศัพท์เคลื่อนที่แบบเดิมเนื่องจากความคมชัดของสัญญาณเสียง และสามารถเก็บไฟล์เสียงเพื่อนำไปใช้งานในด้านต่างๆ เช่น การวิเคราะห์รายละเอียดของเสียงในงานของตำรวจ เป็นต้น
9. remote LAN access ผู้ใช้สามารถเข้าถึงเครือข่ายอินเตอร์เน็ตได้รวดเร็วกว่าการเข้าใช้งานอินเตอร์เน็ตผ่านโทรศัพท์พื้นฐาน
10. vehicle positioning สามารถเชื่อมต่อกับเครื่องรับสัญญาณดาวเทียมจีพีเอสเพื่อนำมาประยุกต์ใช้ในการติดตามตำแหน่งของยานพาหนะ ทำให้ทราบตำแหน่งปัจจุบันของยานพาหนะได้ทันที
จากที่ทรัพยากรต่าง ๆ ในระบบ เช่น ช่องสัญญาณ นั้นมีอยู่อย่างจำกัด ซึ่งในกรณีนี้ทั้ง voice และจีพีอาร์เอสนั้น ก็จะใช้ช่องสัญญาณร่วมกัน ดังนั้นการนำจีพีอาร์เอสเข้ามาใช้งานจึงหลีกเลี่ยงไม่ได้ที่จะเกิดปัญหาในเรื่องความไม่เพียงพอของช่องสัญญาณ อย่างไรก็ตาม ระบบจีพีอาร์เอส มีความสามารถที่จะทำการบริหารช่องสัญญาณแบบ dynamically ในกรณีของการใช้งานในช่วง peak-time ทำการลดโหลดด้วยการให้มีการส่ง short message บนช่องสัญญาณจีพีอาร์เอสแทนแม้ว่าในทางทฤษฎีแล้ว จีพีอาร์เอสจะสามารถส่งข้อมูลได้ด้วยความเร็วสูงสุดถึง171.2 kbps ซึ่งเป็นการใช้งานของผู้ใช้เพียงคนเดียวบนช่องสัญญาณทั้งหมด 8 time slot(ช่องสัญญาณย่อย ๆ) โดยปราศจากการป้องกันการผิดพลาดใด ๆ (error protection) แต่ในความเป็นจริงนั้นไม่มีผู้ให้บริการรายใดที่ให้ผู้ใช้เพียงคนเดียวใช้งาน time slot ทั้งหมด โดยส่วนใหญ่มักยอมให้ใช้สูงสุดเพียง 2-3 time slot เท่านั้น ดังนั้นความเร็วที่สามารถใช้งานได้จริง จึงต่ำกว่าค่า
ในทางทฤษฎีมาก
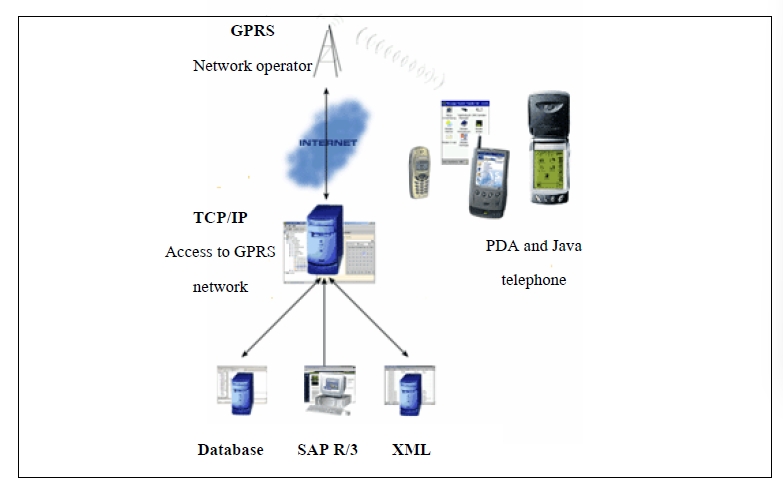
รูปที่ 2.1 แสดงการประยุกต์ใช้งานเทคโนโลยีจีพีอาร์เอส ในงานด้านต่าง ๆ
GSM (Global System for Mobile Communications)
GSM (Global System for Mobile Communications) เป็นระบบโทรคมนาคมเคลื่อนที่ที่มีมาตั้งแต่ปี 1980 และเป็นมาตรฐานระบบโทรศัพท์เคลื่อนที่ที่ใช้กันอย่างแพร่หลายทั่วโลก ระบบนี้ใช้เทคโนโลยีดิจิตอลเพื่อสื่อสารข้อมูลและเสียงระหว่างอุปกรณ์ ระบบ GSM มีความเร็วในการสื่อสารสูงถึง 9.6 กิกะบิตต่อวินาที และมีความปลอดภัยในการส่งข้อมูลที่สูง เนื่องจากมีการใช้ระบบการเข้ารหัส (encryption) ของข้อมูลที่ส่งไปกัน
ระบบโทรศัพท์เคลื่อนที่ที่ใช้ทั่วไปในปัจจุบันคือระบบ 4G LTE (Long-Term Evolution) ซึ่งเป็นเทคโนโลยีการสื่อสารแบบไร้สายที่มีความเร็วสูงและมีประสิทธิภาพในการเชื่อมต่อข้อมูลสูง
ระบบ 4G LTE (Long-Term Evolution) ประกอบด้วยส่วนประกอบหลัก 3 ส่วน คือ
1. สถานีฐาน (Base Station) - เป็นสถานีส่งสัญญาณที่ตั้งอยู่บนเสาอากาศหรือติดตั้งบนอาคาร เพื่อส่งสัญญาณไปยังโทรศัพท์เคลื่อนที่ที่อยู่ใกล้เคียง
2. อุปกรณ์ในระบบ (Core Network) - เป็นระบบที่ใช้ในการส่งข้อมูลระหว่างสถานีฐานและอุปกรณ์ในเครือข่าย ซึ่งประกอบด้วยเซิร์ฟเวอร์ ระบบเชื่อมต่อข้อมูล และซอฟต์แวร์ต่าง ๆ
3. อุปกรณ์ในมือถือ (Mobile Device) - เป็นอุปกรณ์โทรศัพท์เคลื่อนที่ที่รองรับระบบ 4G LTE ซึ่งสามารถรับสัญญาณและส่งข้อมูลได้ด้วยความเร็วสูง มีความสามารถในการเชื่อมต่ออินเทอร์เน็ตและใช้งานแอปพลิเคชันต่าง ๆ ได้
ข้อจำกัดของ GPS (Global Positioning System)
จากที่ทรัพยากรต่าง ๆ ในระบบ เช่น ช่องสัญญาณ นั้นมีอยู่อย่างจำกัด ซึ่งในกรณีนี้ทั้ง voice และ GPRS ก็จะใช้ช่องสัญญาณร่วมกัน ดังนั้นการนำ GPRS เข้ามาใช้งานจึงหลีกเลี่ยงไม่ได้ที่จะเกิดปัญหาในเรื่องความไม่เพียงพอของช่องสัญญาณ อย่างไรก็ตาม ระบบ GPRS มีความสามารถที่จะทำการบริหารช่องสัญญาณแบบ dynamically ในกรณีของการใช้งานในช่วง peak-time ทำการลดโหลดด้วยการให้มีการส่ง short message บนช่องสัญญาณ GPRS แทนแม้ว่าในทางทฤษฎีแล้ว GPRS จะสามารถส่งข้อมูลได้ด้วยความเร็วสูงสุดถึง 171.2 kbps ซึ่งเป็นการใช้งานของผู้ใช้เพียงคนเดียวบนช่องสัญญาณทั้งหมด 8 time slot (ช่องสัญญาณย่อย ๆ) โดยปราศจากการป้องกันการผิดพลาดใด ๆ (error protection) แต่ในความเป็นจริงนั้นไม่มีผู้ให้บริการรายใดที่ให้ผู้ใช้เพียงคนเดียวใช้งาน time slot ทั้งหมด โดยส่วนใหญ่มักยอมให้ใช้สูงสุดเพียง 2-3 time slot เท่านั้น ดังนั้นความเร็วที่สามารถใช้งานได้จริง จึงต่ำกว่าค่าในทางทฤษฎีมาก
และยังมีข้อจำกัดบางอย่างดังนี้
1. การสัญญาณ GPS จะมีปัญหาในบริเวณที่มีอุปสรรคสูง เช่น อาคารสูง ซึ่งอาจทำให้สัญญาณไม่มีความแม่นยำเท่าที่ควร หรือหากอยู่ในบริเวณที่มีต้นไม้ หรืออุปกรณ์อื่น ๆ ที่อาจเป็นสิ่งกีดขวางสัญญาณ GPS
2.การใช้งาน GPS ต้องการพลังงานจากแบตเตอรี่ เมื่อใช้งาน GPS อย่างต่อเนื่องอาจจะทำให้แบตเตอรี่ในอุปกรณ์ต้องการการชาร์จบ่อยๆ
3. สำหรับการใช้งาน GPS ในบางการณ์ เช่น การใช้งานในท้องทะเลหรือบริเวณแถบโลกใต้ อาจมีความยากลำบากในการรับสัญญาณ GPS เนื่องจากการกระจายสัญญาณของดาวเทียมไม่สามารถครอบคลุมพื้นที่ได้ทั้งหมด
4. การแสดงผลตำแหน่งของ GPS อาจมีความไม่แม่นยำในบางกรณี เนื่องจากการคำนวณผลตำแหน่งจะถูกคำนวณจากสัญญาณจากดาวเทียมหลายตัว ซึ่งอาจมีความคลาดเคลื่อนบ้างในบางกรณี
รายการอ้างอิง
กัลป์รัฐ คล้ายดวง (2542). การลดความผิดพลาดทางตำแหน่งของผู้ใช้จีพีเอสโยวิธีการปรับแก้ค่าตำแหน่งดาวเทียม. วิทยานิพนธ์ปริญญาวิศวกรรมศาสตรมหาบัณฑิต สถาบันเทคโนโลยีพระจอมเกล้าเจ้าคุณทหารลาดกระบัง.
ชาญชัย กุศลจิตกรณ์ (2548). การวิเคราะห์สมรรถนะของระบบติดตามการเคลื่อนที่ของรถโดยใช้
จีพีเอสร่วมกับระบบ Dead-Reckoning. วิทยานิพนธ์ปริญญาวิศวกรรมศาสตรมหาบัณฑิต.
สถาบันเทคโนโลยีพระจอมเกล้าเจ้าคุณทหารลาดกระบัง.
บริษัท อี เอส อาร์ ไอ (ประเทศไทย) จำกัด.(2545). คู่มือการใช้งาน(ฉบับภาษาไทย) GARMIN
eTrex Legend.
ลัญฉกร วุฒิสิทธิกุลกิจ. (2547). MATLAB การประยุกต์ใช้งานทางวิศวกรรมไฟฟ้า. สำนักพิมพ์
แห่งจุฬาลงกรณ์มหาวิทยาลัย.
A. Lahrech, C. Boucher and J.-C. Noyer.(2005). Accurate vehicle positioning in urban areas.
Industrial Electronics Society 2005: 486-490.
Cesar Barrios, Henry Himberg, Yuichi Motai,Adel Sedek.(2006). Multiple Model Framework ofAdaptive Extended Kalman Filtering for Predicting Vehicle Location. Proceedings ofthe IEEE ITSC 2006: 1053-1059.
El-Rabbany,Ahmed.(2002). Introduction to GPS:The Global Positioning System. Boston:
Artech House.
Jianping Xing, Jun Zhang, Weiye Li, Hebin Cheng, Xiaohui Shi, Changqing Li.(2006). Vehicle
GPS Real Time Monitoring Communication System Base on GPRS/CSD. Intelligent
Control and Automation 2006. The Sixth World Congress on Volume 2: 8745-8749.
Mohinder S.Grewal and Angus P. Andrews (2001). Kalman Filtering Theory and Practice
Using MATLAB. 2nd ed. New York: John Wiley & Son, Inc.
Nakarin Satthamnuwong.(2002). Dead Reckoning-Aided GPS Vehicle Navigation Using
Sequential Least Squares with Weighted Constraints. Doctor of Philosophy of Purdue University.
